制造公司必须使他们的生产和分销系统自动化以保持领先地位,否则他们将面临竞争对手的挑战。通过机器人与传感器技术,可实现低成本,高产量和多动态的基础架构来快速响应客户需求量。
机器人配置智能3D传感器的方法,常用的方法有两种,一是安装在框架上,二是安装在机器人上。
一、安装在框架上
在机架安装系统中,传感器处于与机器人分离的固定位置。传感器扫描工作区域以定位对象,并将姿势数据传送到机械臂。需要进行校准以建立传感器坐标系和机器人坐标系之间的关系(通常称为“手对眼”校准),以便可以由机器人拾取3D点云中标识的对象。
3D智能传感器执行校准,点云采集,零件定位和机器人通信。机器人执行路径规划逻辑,该逻辑可以准确有效地移动末端执行器以拾取零件。

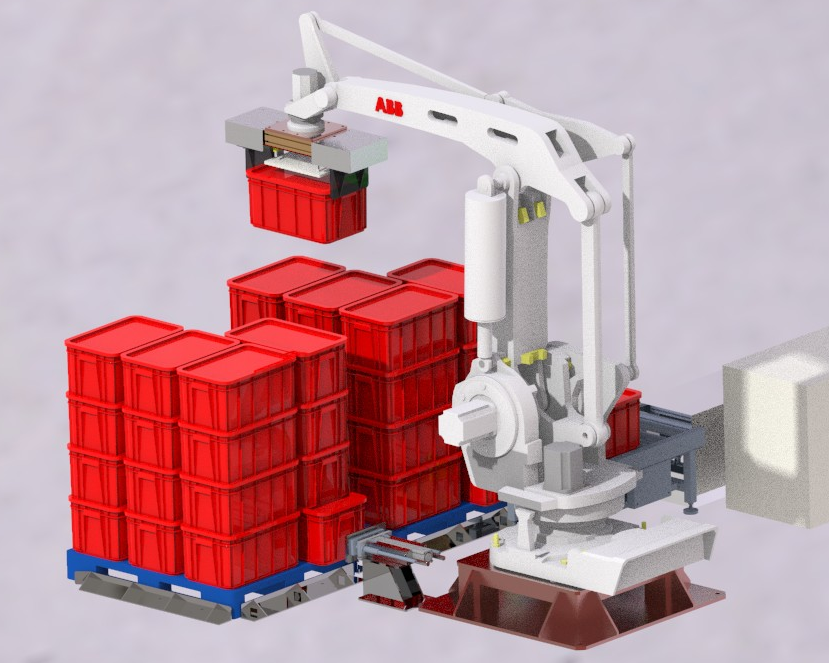
框式传感器和机械手用于垃圾箱拣选应用。

机器人安装的传感器,用于扫描和检查大型目标。
框装方法在箱拣货中很常见,其中扫描数据是一个点云,其中包含箱中同一对象的许多随机堆叠的部分。智能本地化软件处理点云,以识别下一个要拾取的零件(通常位于堆的顶部)并进入制造过程。
除了用于拾取和放置的对象检测之外,传感器还可以用于目标的测量和质量检查,其中机器人会将要检查的对象提供给传感器,并做出通过/不通过决策。

固定式传感器,用于尺寸测量和质量检查。
二、安装在机械臂(手上)
在此配置中,传感器安装在机器人末端执行器上,并引导机器人执行实时定位和关键任务,例如焊缝跟踪或组装。
在机器人手臂上安装了传感器的系统所需的校准通常称为“手眼”校准。在保证准确性的同时,“牵手眼”系统具有高度的灵活性,能够克服固定工作环境的局限性,并且可以检查具有许多被遮挡区域的大型目标。
传感器与机器人集成的关键要素:“非智能”与智能方法
1、沟通
与标准的“非智能”传感器相比,3D智能传感器的第一个主要优势是它们可以直接与机器人通信。标准传感器通常通过主机PC与机器人通信,这会增加延迟,系统成本和集成复杂性。

智能3D机器人视觉系统,用于半结构化垃圾箱拣选。
2、校准
传感器-机器人校准的目的是建立传感器的坐标系与机器人坐标系之间的关系。这导致了转换,该转换将位于3D点云中的零件(传感器坐标)转换为机器人可以通过其运动/编码器子系统(机器人坐标)拾取的姿势。
校准例程通常需要进行简短的培训设置,在此过程中,已知的伪影会在几个方向上呈现给传感器(例如球杆)。分析所得的扫描以提取姿势数据并建立6自由度转换,该转换将球杆位置从3D扫描转换为相应的机器人位置。
3、测量算法开发
3D智能传感器提供内置的测量工具和控制决策,使机器人系统能够测量和检查目标物体。如果没有昂贵的第三方软件和外部PC,“非智能”传感器将无法提供这些相同的检查功能。
由于您无需编写任何机器人程序或校准例程,也无需添加第三方软件或PC,因此使用3D智能传感器可快速部署解决方案。如果想实现更高灵活性和控制力,则可以选择使用软件开发套件来开发自定义工具并将其嵌入到传感器中。

智能3D机器人视觉可用于汽车间隙和冲洗检查。
视觉引导机器人(VGR)的优点
通常,机器人会盲目地重复移动到其工作范围内的已知位置。借助智能3D机器人视觉引导,机器视觉可根据传感器的视线提升机器人以执行动态运动,从而使机器人在制造过程中获得更大的价值。
VGR已在许多行业中使用,包括包装与物流,汽车,制药,医疗,电子,食品和饮料。产品和批生产之间的切换是由软件控制的,并且非常快速,无需进行机械调整。
VGR的制造优势:
将非智能机器人扩展到更智能的应用程序中
高残留系统价值,即使更改产量
高机器效率,可靠性和灵活性
进一步降低了体力劳动成本
VGR行业应用示例:
最常见的VGR应用是拾取和放置,传感器安装在工作区域上,机器人在该工作区域中执行拾取和放置运动(例如,将零件从传送带转移到箱子)。
VGR的另一个常见应用是零件检查,其中机器人上的操纵器将传感器移动到工件上的各种特征以进行检查(例如,车身上的间隙和齐平检查,或孔和螺柱尺寸公差)。
最后,VGR的最复杂的应用是机器人上的机械手拾取包含多个传感器的“夹具”,并进行编程以拾取工件并使用传感器反馈引导其插入更大的组件中(例如,门板或挡风玻璃插入)。